Vadstena: AI-based Automatic Tree Extraction Explained
August 21, 2020
Previously we described Vadstena’s semantic capabilities by extracting the land cover and LOD2 buildings. One part of the process is a tree extraction, which is interesting both from technical point of view and its use in practical applications. 3D models of trees are used in urban planning for better understanding the spatial composition of the urban landscape and in areas like vegetation inventory, shadow analysis, solar potential modeling and urban microclimate prediction. The Melowntech’s LOD2 buildings with 3D trees are an essential input for these processes.
The tree extraction process starts by looking at areas marked as „trees“ in the Vadstena 2D land cover. Then we derive the relevant points from the 3D model of the scene and fit sphere onto them. The sphere is then deformed to match the shape of the tree and the result is saved in a form of spherical harmonics model. This also makes for an effective and compact format for storage and data exchange.
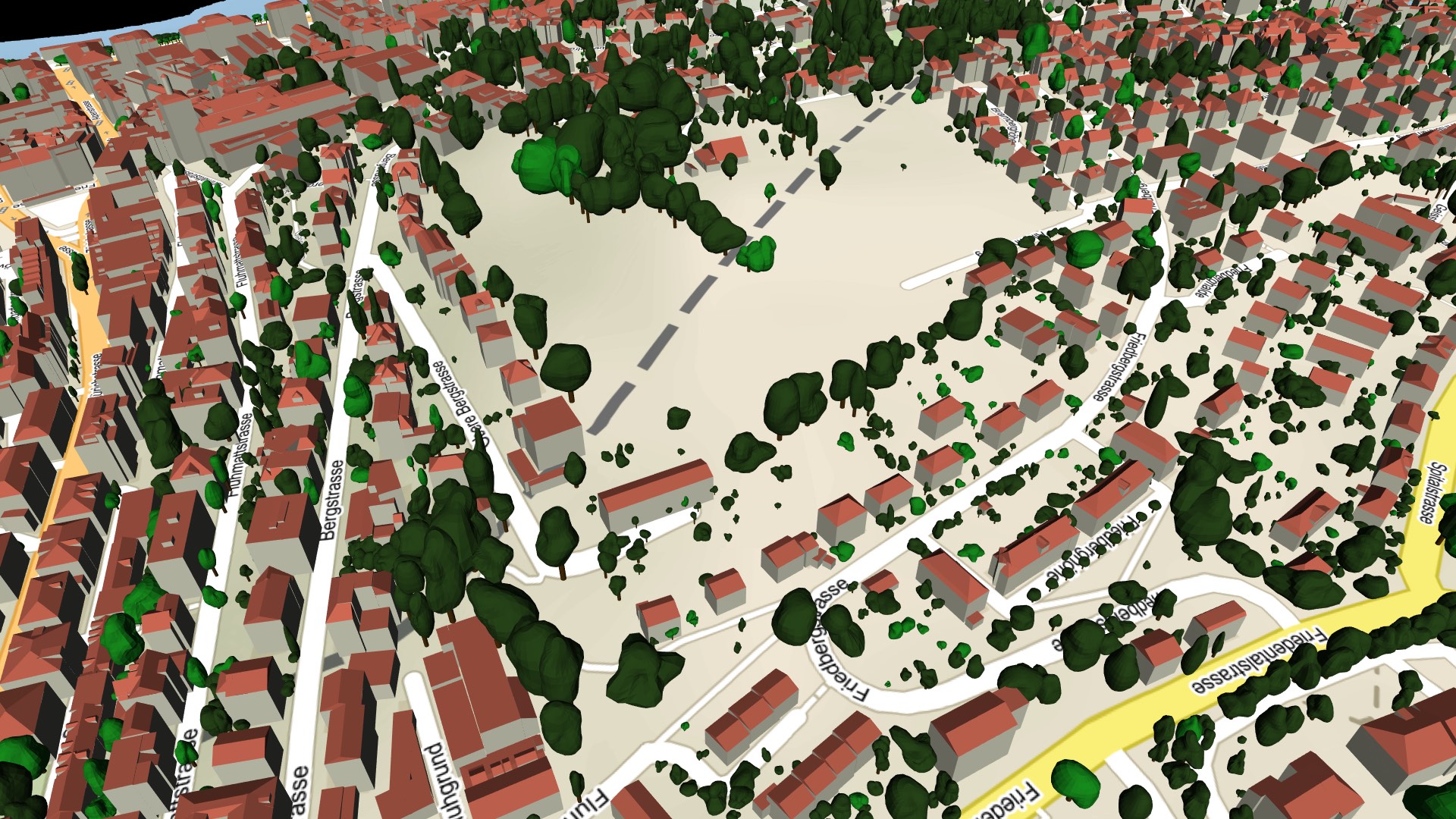
Lucerne, Switzerland



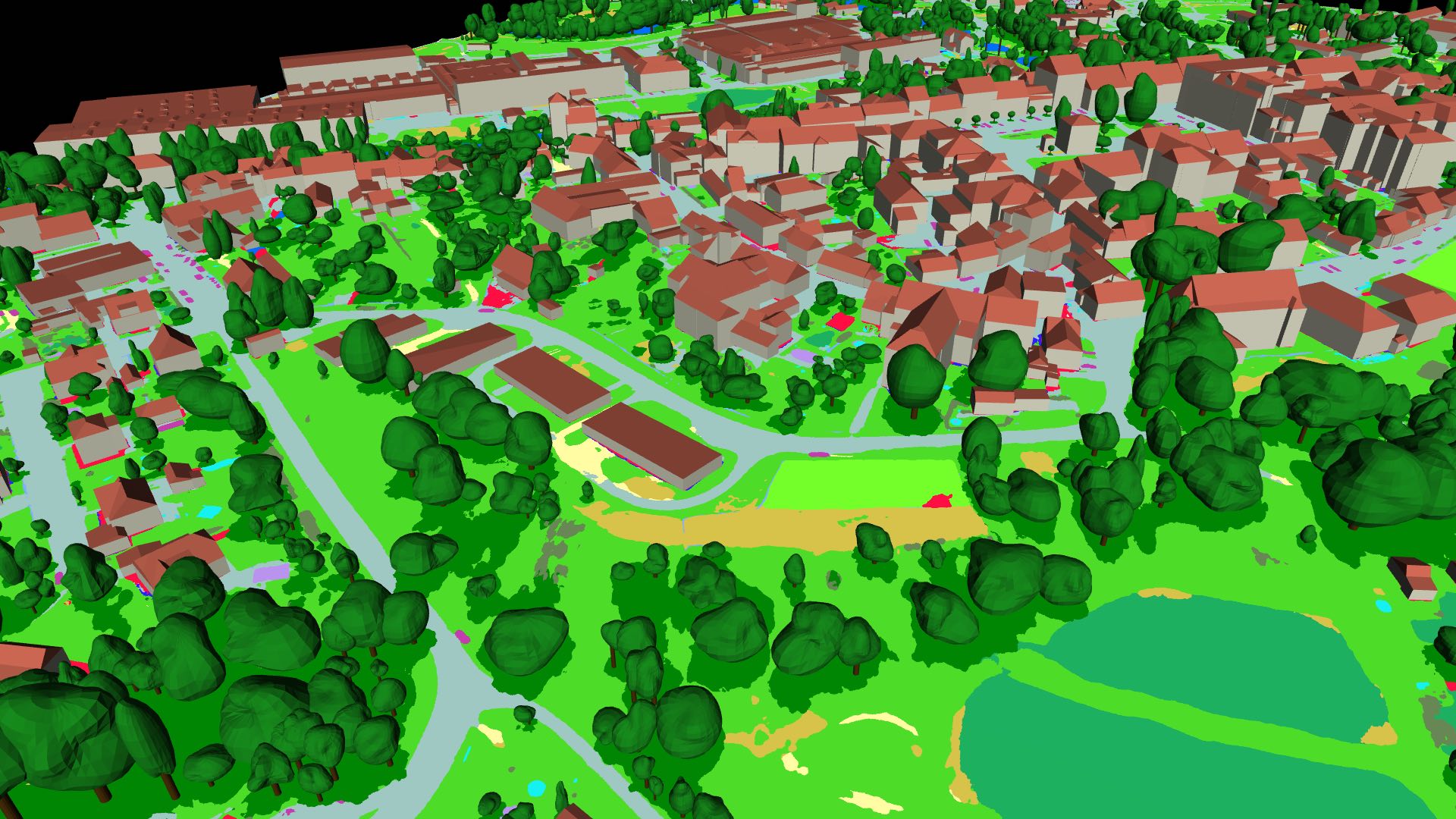
Frydlant, Czechia




In general, Vadstena achieves excellent results in tree extraction in urban environments in alleys, gardens and parks where the trees form small groups or are solitary standing. Those trees are usually visible from all sides, and we can precisely model their surface. On the other hand, areas with contiguous tree canopy are harder to segment correctly as only treetop are visible and LiDAR data would be required to uncover the full tree shapes.
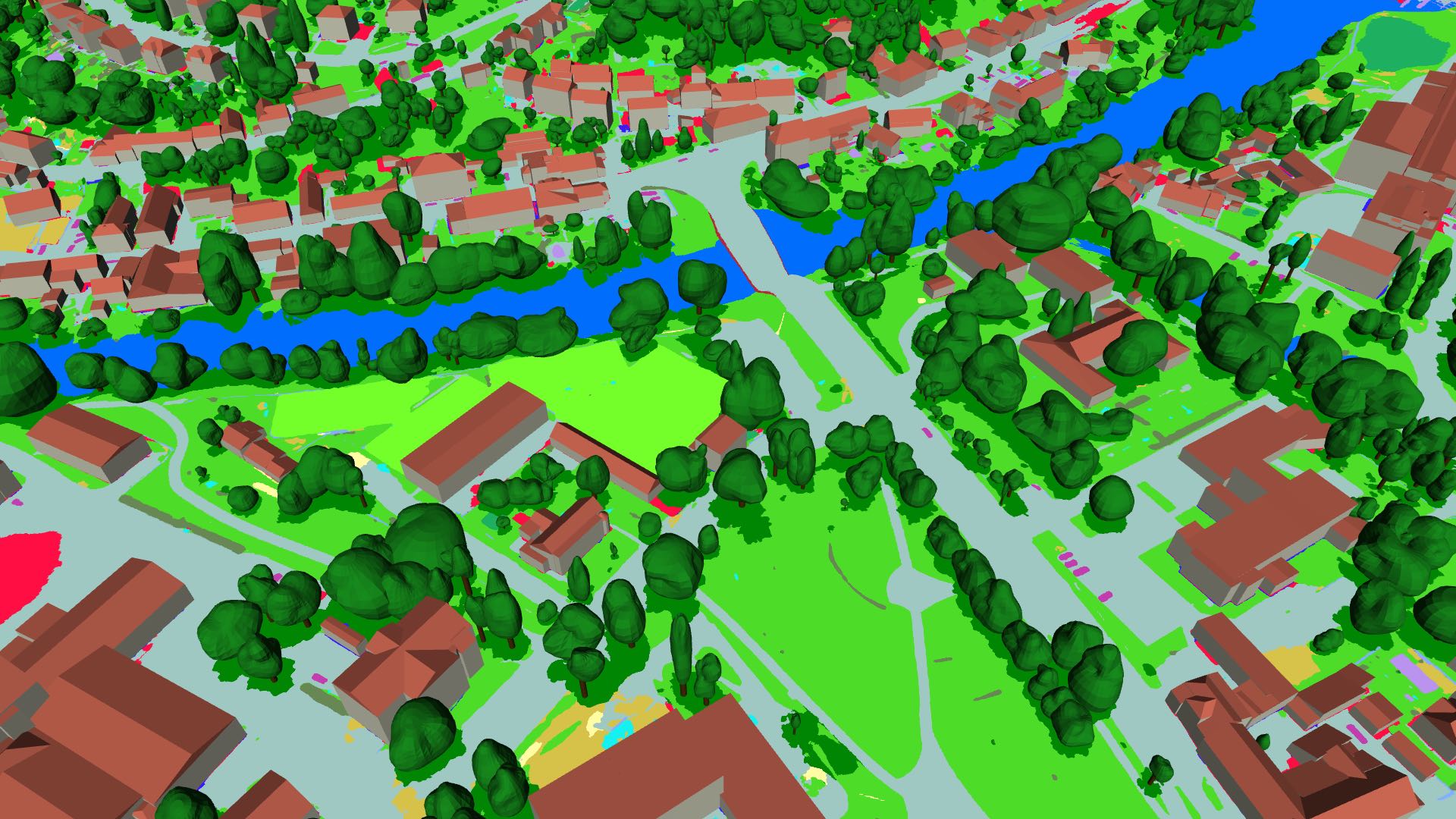
Benatky nad Jizerou, Czechia
Examples include the landcover as a based map.


Melowntech’s vision is to create a digital counterpart to the real world. To achieve this vision, we are using Vadstena a fully automatic 3D natural and urban landscape reconstruction software system. Melowntech succeeds in remodeling the world accurately in the form of photorealistic 3D meshes, orthophotos, a digital terrain model and more, however, our long term goal is to describe the world fully semantically. AI-based Vadstena land-cover is now a stable part of Vadstena’ output and the first semantic description of the scene. LOD2 extraction is another step in how to achieve the full semantic world description.